给博彩网站做优化/湖南网站营销推广
近年来,轻型仿生机器人因其卓越的运动灵活性与环境适应性受到国际机器人领域的广泛关注。然而,现有气动驱动器普遍受限于低模量粘弹性材料的回弹滞后效应与能量耗散特性,加之其"非刚即柔"的二元结构设计范式,难以同时满足高功率密度与快速动态响应的驱动需求,制约了机器人的整体运动性能。因此,如何从材料特性和结构形式两方面革新驱动单元的设计原理与制备工艺,突破现有粘弹性材料驱动方式的功率密度和响应频率瓶颈,成为高性能仿生机器设计所亟待攻克的关键挑战。图1 论文截图近日,上海交通大学陈根良教授、王皓教授团队联合西湖大学姜汉卿教授、复旦大学张壮青年研究员设计了一种“面向机器人多模式运动的去电子化刚弹耦合高频振荡驱动单元”,为高性能气动机器人开发提供了一种全新设计思路。该设计将双稳态屈曲梁、抗拉伸折展腔和低阻抗管路阀进行有机融合,利用弹性铰接梁的跳跃屈曲现象和柔性摆动阀的回转对称效应,实现了基于机械负反馈的高频率自振荡运动。借助弹性复材的高爆发力和柔软织物的低迟滞特性,突破了现有去电子化纯机械驱动单元的响应频率慢、功率密度低和支撑刚度差等局限。所开发的自振荡驱动单元具有轻质高负载、快速高响应和高效低耗损特性,在稳定气源输入下能够实现50Hz以上往复输出,较现有同类型方案提高一个量级。上述高频自振荡驱动单元应用于多种移动机器人,大幅提升了轻型仿生机器人的运动性能。研究工作以“A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion”为题发表于Nature Communications期刊。上海交通大学陈根良教授、博士生龙泳舟为本文共同第一作者。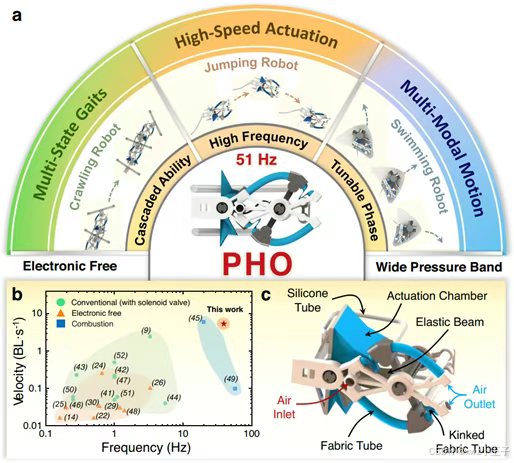
图2. 面向机器人多模式驱动的去电子化高频气动振荡驱动器(PHO)去电子化气动振荡驱动单元通常利用弹性结构的机械不稳定性,将恒定压力气动输入转化为周期性运动输出,以驱动机器人执行特定任务。然而,现有设计形式普遍依赖环路振荡结构,不仅振荡频率低,同时振荡模式也较为单一,极大限制了此类去电子化机械元器件的应用。针对上述问题,本研究引入刚弹软材料/结构相耦合的思想,将折展驱动腔体、屈曲双稳态梁和柔性换向阀有机融合,通过特殊的流道设计构建了机械负反馈机制,实现了在无需下拉电阻前提下的单驱动器独立振荡。该设计利用铰接双稳态梁失稳跳变过程中主被动轴的相位差构建流道切换窗口,大幅提升了频响带宽,实现了高达51Hz的最高振荡频率。该性能不仅大幅领先现有无电子化气动振荡驱动器,同时相比传统电磁阀也具有显著优势。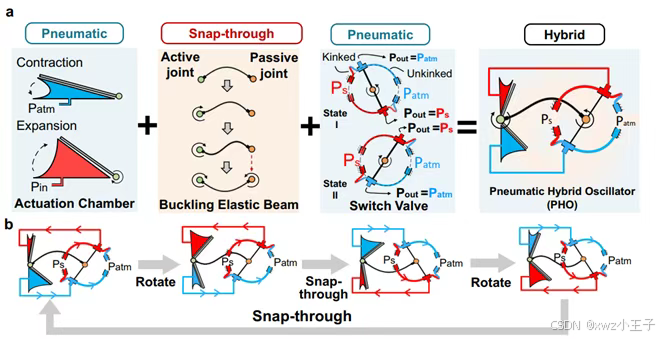
图3. 振荡器设计与驱动原理流体振荡单元的响应过程涉及多种力学机理的耦合作用,为了简化系统的频率特性预测模型,本研究基于电路等效的思想,根据驱动腔、弹性梁和换向阀三个单元各自的物理特性,将其等效为相应的电子元件,从而建立系统的频率预测模型。其中,弹性板作为能量转换与切换阀推动的单元,其特征可以等效为电容。类似地,气动腔体也承担能量转换的作用,也可以等效为电容。两者的运动特征时间则由电阻表征。通过建立给定的不同参数下的弹性板变形与受力关系曲线,可以解析地表征电容值。利用等效的模拟电路可以计算系统的振荡频率,完成不同设计参数下振荡频率的预测,从而实现对PHO的优化设计以达到最高振荡频率。
图4. 基于等效模拟电路的驱动器振荡频率预测模型基于所提出的高频振荡驱动器,开发了一款模仿袋鼠运动的双足跳跃机器人。该机器人包含一对双足和一根柔性尾部,利用摩擦力各向异性实现持续的前向运动。实验表明,机器人的运动性能与驱动频率、起跳角度、跳跃步长和滞空时长占比有关,通过优化机器人的双腿安装角度和驱动频率,最终实现了高达5.1倍体长每秒的机器人最大运动速度,该速度不仅远超现有去电子化气动机器人,同时也领先于使用电磁阀门的气动机器人。该实验表明所提出的轻量化振荡驱动单元具有良好的输出性能。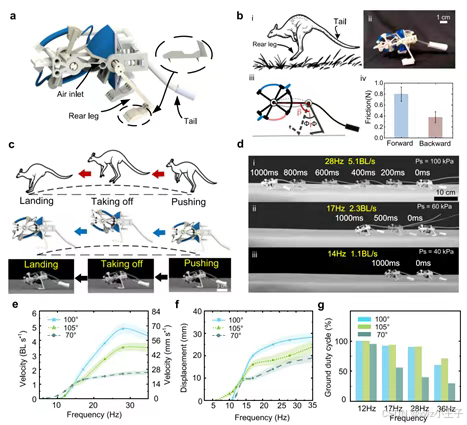
图5. 双足高频自振荡气动跳跃机器人针对常规振荡器依赖环路振荡的设计局限,本研究所提出的振荡单元提供了可任意驱动单元数量级联的能力。通过将多个振荡器的流道进行组合编辑,便可实现丰富的级联响应模式,从而用于具有多个逻辑驱动单元的机器人系统中。基于该设计,本研究提出了一种多足爬行机器人,该机器人由两个级联的振荡器构成,在恒定的输入气源下,两个驱动单元在给定周期内交替响应,从而实现稳定、快速的前向运动。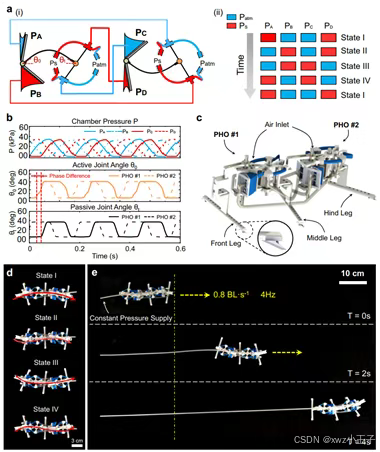
图6. 基于多振荡器级联级的爬行机器人为了实现在设计了振荡器的频率后依然保持输出可调的功能,本研究在振荡主弹性板的基础上引入了辅助弹性板。通过多板并联的形式,利用辅助弹性板的变形对主弹性板的屈曲过程进行调控,从而实现屈曲振荡的相位调整。基于此原理,使用CO2气瓶为气源,设计了一款无绳系的水下游动机器人,在恒定的气源供给下,通过调整辅助梁的初始角度,可实现丰富的机器人航迹选择,极大拓宽了PHO的实际应用场景。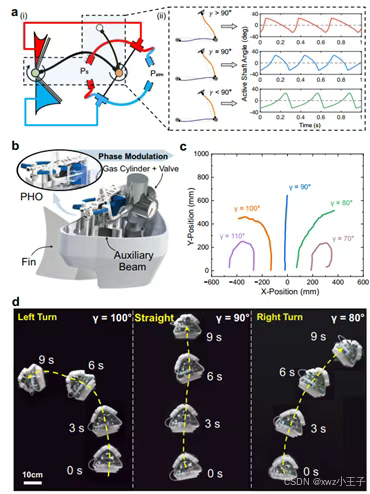
图7. 可调振荡相位的无缆化水面机器人上海交通大学陈根良教授为本文第一作者和通讯作者;上海交通大学博士研究生龙泳舟为本文共同第一作者。上海交通大学博士生姚思越为本文的第二作者。博士生唐术杰、博士生罗俊杰和王皓教授为本文共同作者。复旦大学青年研究员张壮、西湖大学工学院姜汉卿教授为本研究的共同通讯作者。该工作受到国家重点研发计划项目、国家自然科学基金,以及西湖大学未来产业研究中心和西湖教育基金会的资助。参考文献Chen, G., Long, Y., Yao, S. et al. A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion. Nat Commun 16, 1449 (2025).论文信息发布期刊:Nature Communications发布时间:2025年2月7日论文标题 A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotionDOI: https://doi.org/10.1038/s41467-025-56704-1